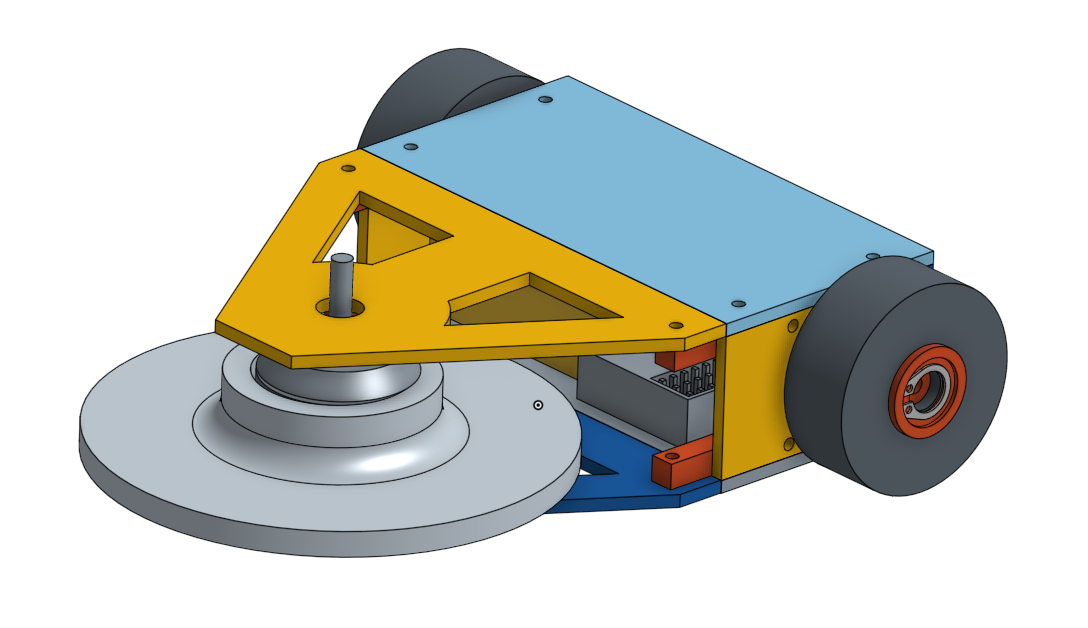
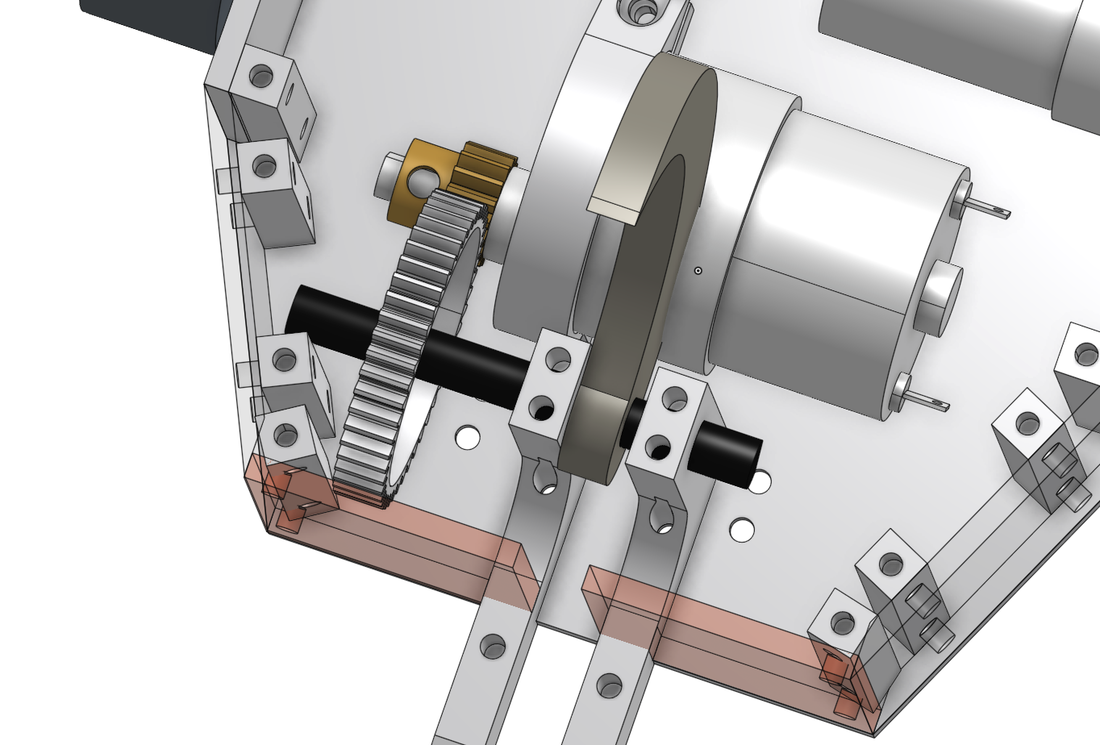
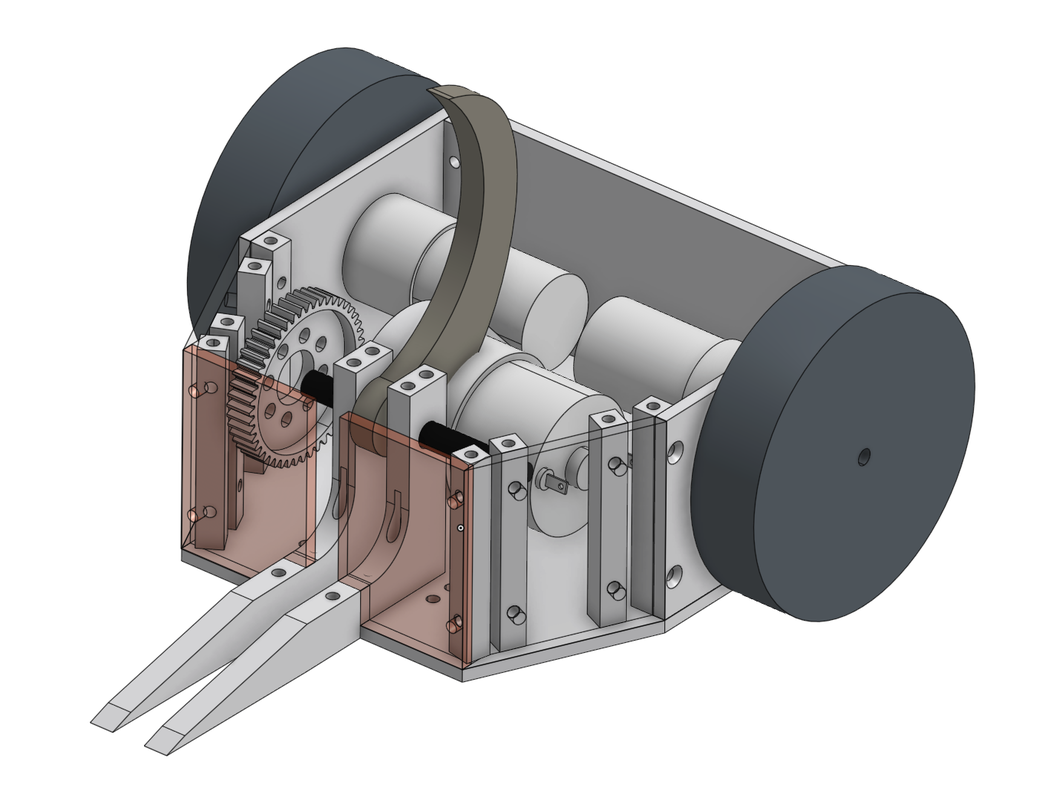
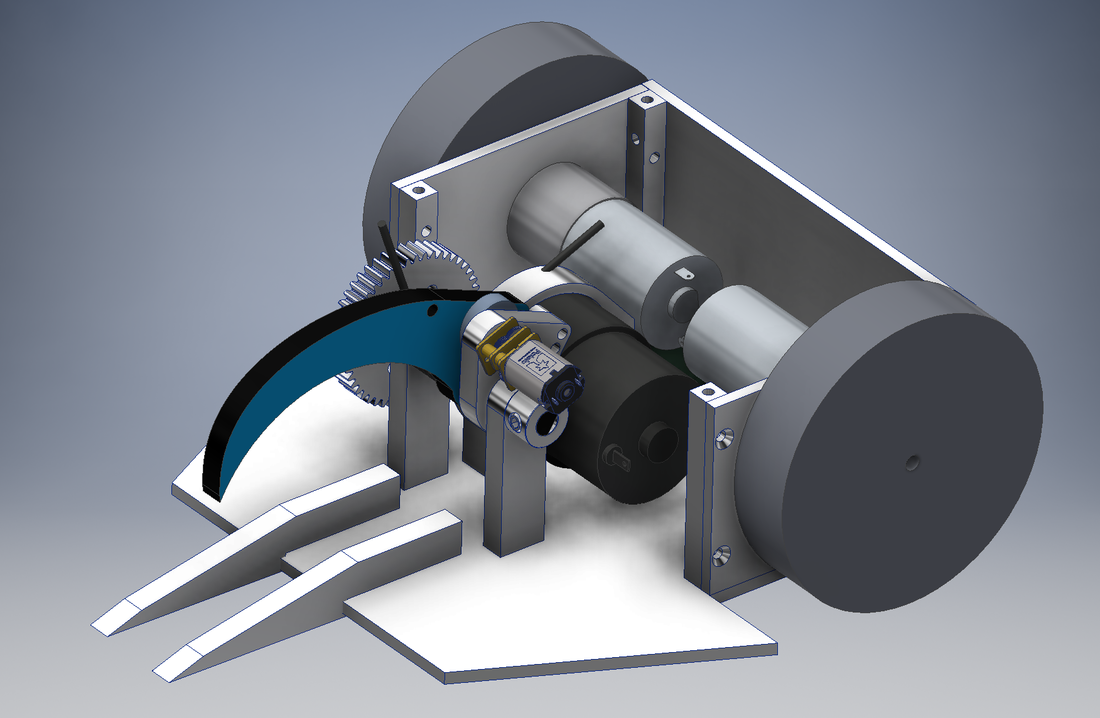
I was at Denver Maker Faire for about 30 seconds before I started planning the bot I would bring next year. Cpt. Hook's design was proved to be solid structurally, but fundamentally ill suited to the competition. At Denver Makerfaire I networked with several other CO bot builders, and we are going to attempt to collaborate on a modular combat robot platform. The platform will feature a common drive base and a standard mounting arrangement for attaching weapons.We're planning a roughly 50-50 split of drive train to weapon mass. The initial designs are starting to look good:

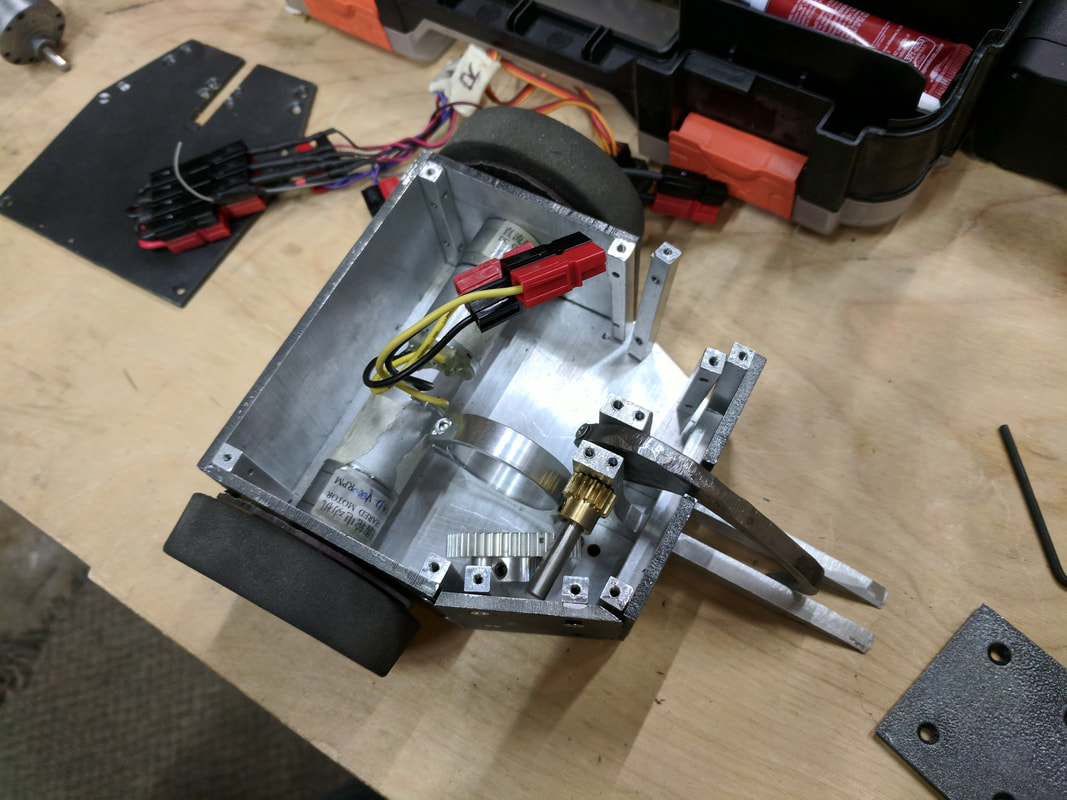
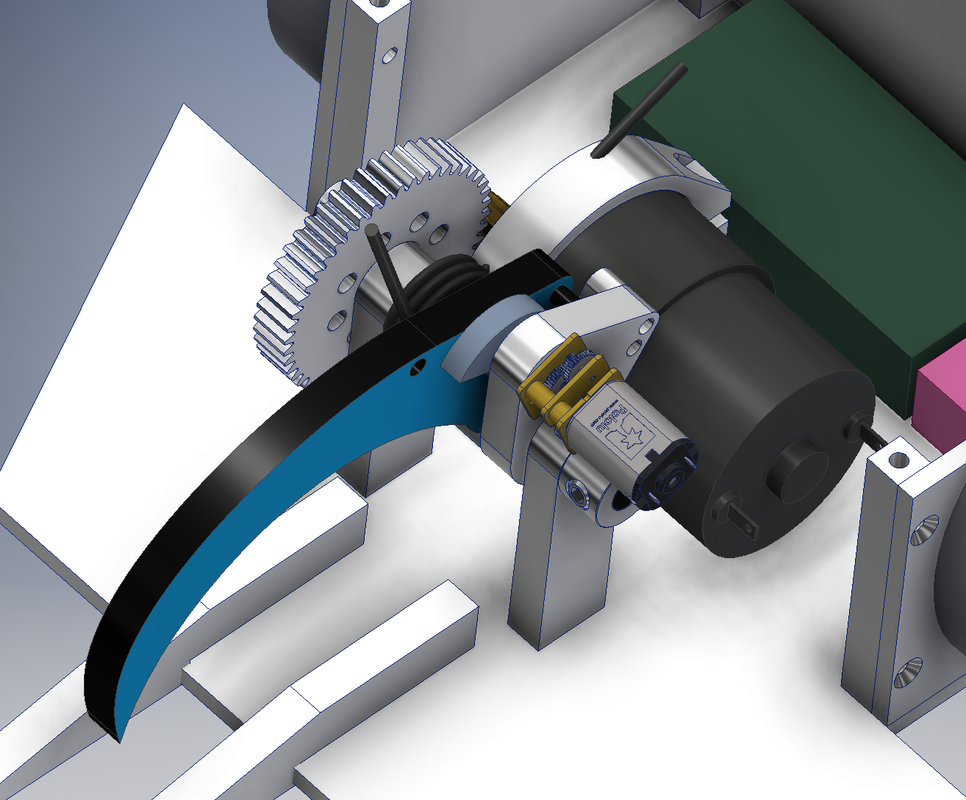
I am still really excited by the idea of a crushing robot in the 3lb weight class. However, I'm a little burned by Cpt. Hook's performance so for at least my next bot I'm going for something a little more dangerous:
My collaborators have some other interesting ideas that they are working on too. I'm hoping we'll be able to field roughly 4-5 bots by next maker faire, and that we'll have a prototype ready for Rocky Mountain STEAM Fest in April.


 RSS Feed
RSS Feed
