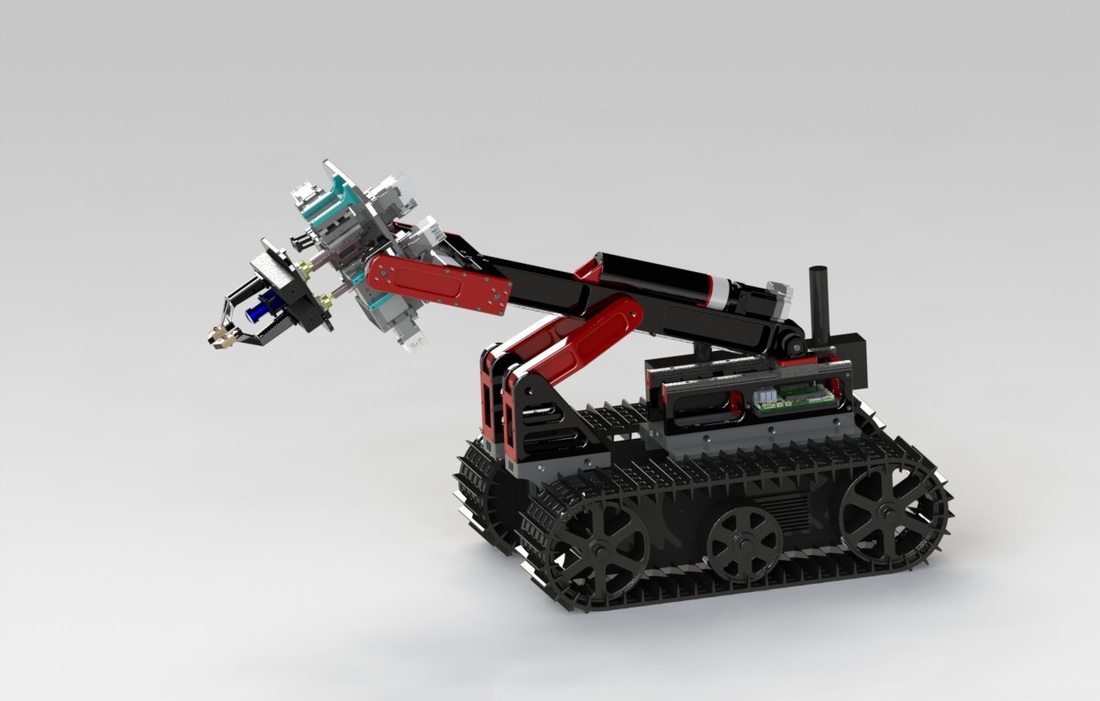
ATAC:ATAC stands for Augmented TALON for Autonomous Control. For the ATAC project I was able to take charge as the lead programmer for the project. The ATAC project was an extension onto previous work that I had undertaken in exploring the effectiveness of using a Tri-Sphere for manipulation. This project combined the TY2 Tri-Sphere, I had previously worked on, with a two degree of freedom parallel arm.
The fundamental concept behind the ATAC project was to combine the extreme resolution and compactness of a parallel robotic system with the extended work envelop of a conventional serial arm. The idea being that this combination would be able to combine the best parts of both systems to produce a novel wide reaching and resolved system. The ATAC robot was designed to be mounted on top of a QinetiQ TALON. The arm was designed by Charlie Hagen and features two degrees of freedom. The second degree of freedom is serially connected with first, and the first degree of freedom is defined by a parallel linkage. My work with the ATAC system involved designing from the ground up its entire controls architecture, solving the kinematics of the entire system, porting the Microsoft Kinect sensor into Labview, and overseeing two interns who assisted with development. To learn more about Tri-Spheres look here: http://www.carterschultz.com/wr2-project.html |
   |
