The Beginning
Through my membership at the local hackerspace, I learned that Sparkfun puts on an annual Battlebot competition. They have 1lb and 3lb classes, and the 2016 competition attracted 30+ bots. Information about the competition can be found here: https://avc.sparkfun.com/ . I've decided to try to build a 3lb battle bot.
Doing Some Research
I did a fairly quick "literature" review of Battlebot designs, and tried to compile the core features of a good design. My research was by no means comprehensive (watching 20+ hours of youtube footage), but I came to a few conclusions.
Firstly, at the lower weight classes bots get knocked everywhere and every-which-way around the arena. Robot's which have some way they can land that prevents them from driving will inevitably land on that side and be immobilized. Robots that can't drive upside down, but that have some self righting mechanism can spend large amounts of the match doing nothing but flipping them selves right way up. I decided in my design I want to to be able to drive or quickly recover from any orientation.
Secondly, spinning weapons are significantly less effective at lower weight classes. From the footage I reviewed it appears much more difficult to do significant damage to a robot with a spinning weapon at these weight classes. Spinning weapons get in some incredible hits that send both bots simply flying around the arena, but almost never is a bot disabled as a result of those hits. I believe that this is due to the significantly lower inertia and friction of these bots. When a spinner weapon lands a hit, both bots are simply pushed apart and the weapons cannot bite into the metal.
Lastly, asymmetric armor leads to bad things happening. I saw many bots that had extremely strong front and top armor, with much weaker (often plastic) sides and back panels. These bots clearly attempted to keep damage localized to their more armor sides, but the chaotic nature of the combat often made that impossible.
I looked around and I saw a lot of hammer weapons, spinner weapons, and wedge bots, none of which really seemed to be able to do damage to each other. I didn't see good examples of crusher type weapons at the 3 pound weight class. So after some soul searching, I decided I would try to build a crusher robot and see if it was a feasible concept in the 3 lb weight class.
Firstly, at the lower weight classes bots get knocked everywhere and every-which-way around the arena. Robot's which have some way they can land that prevents them from driving will inevitably land on that side and be immobilized. Robots that can't drive upside down, but that have some self righting mechanism can spend large amounts of the match doing nothing but flipping them selves right way up. I decided in my design I want to to be able to drive or quickly recover from any orientation.
Secondly, spinning weapons are significantly less effective at lower weight classes. From the footage I reviewed it appears much more difficult to do significant damage to a robot with a spinning weapon at these weight classes. Spinning weapons get in some incredible hits that send both bots simply flying around the arena, but almost never is a bot disabled as a result of those hits. I believe that this is due to the significantly lower inertia and friction of these bots. When a spinner weapon lands a hit, both bots are simply pushed apart and the weapons cannot bite into the metal.
Lastly, asymmetric armor leads to bad things happening. I saw many bots that had extremely strong front and top armor, with much weaker (often plastic) sides and back panels. These bots clearly attempted to keep damage localized to their more armor sides, but the chaotic nature of the combat often made that impossible.
I looked around and I saw a lot of hammer weapons, spinner weapons, and wedge bots, none of which really seemed to be able to do damage to each other. I didn't see good examples of crusher type weapons at the 3 pound weight class. So after some soul searching, I decided I would try to build a crusher robot and see if it was a feasible concept in the 3 lb weight class.
Initial Design
Weight is by far the most restrictive rule for a battle bot design, so I set about trying to optimize my design around the weight limit. I started playing around with different combinations of drive motor, weapon motor, and armor thickness to try to find the best balance of weight between them. My conclusion was that with 1/8" aluminum armor on all sides, and a "standard" combination of drive motor and wheel, I could devote about 1 pound to the weapon. Here is what my first pass at a design looked like:
I do not have easy access to a welder for this project, so I opted for a bolted design. I decided that I wanted an easy way to service any part of the robot, so I came up with this "exo-skeleton" structure. Instead of a central chassis that carries the armor and components, the armor is the chassis and all components bolt to the armor panels. To make assembly easy, I came up with these "super-nuts" that will connect all of the armor together.
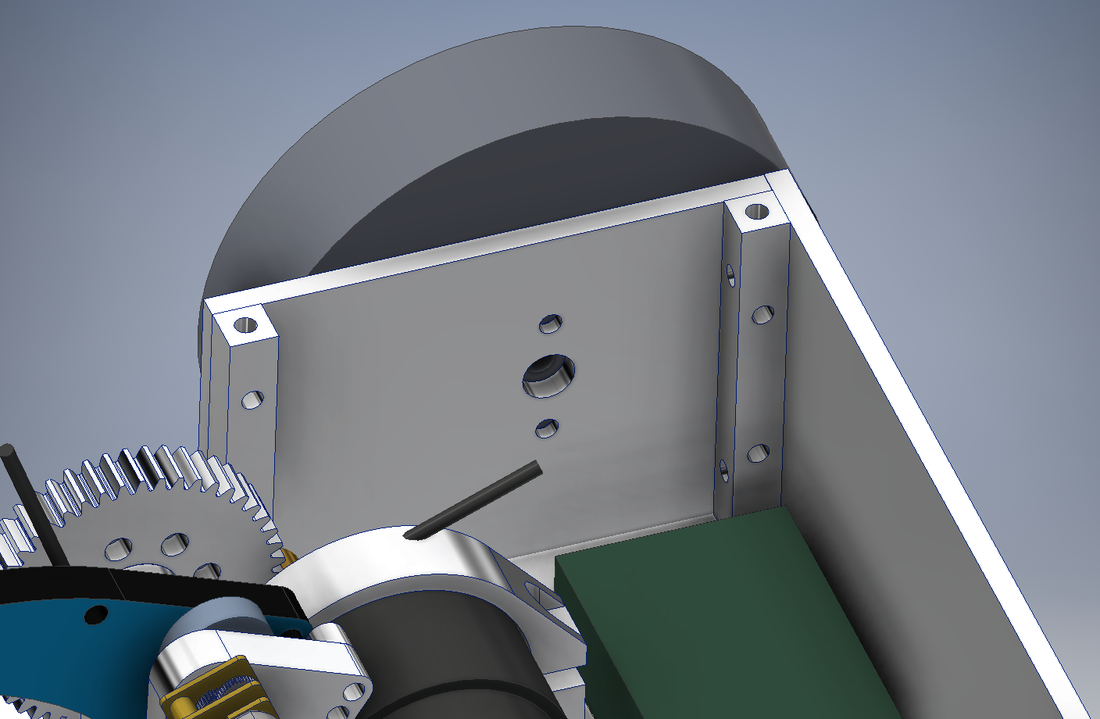
The super-nuts are .25" aluminum columns that are tapped for 4-40 bolts, and serve as captive nuts for the armor panels. The super-nuts are mostly identical and I should be able to fabricate a lot of them very quickly.
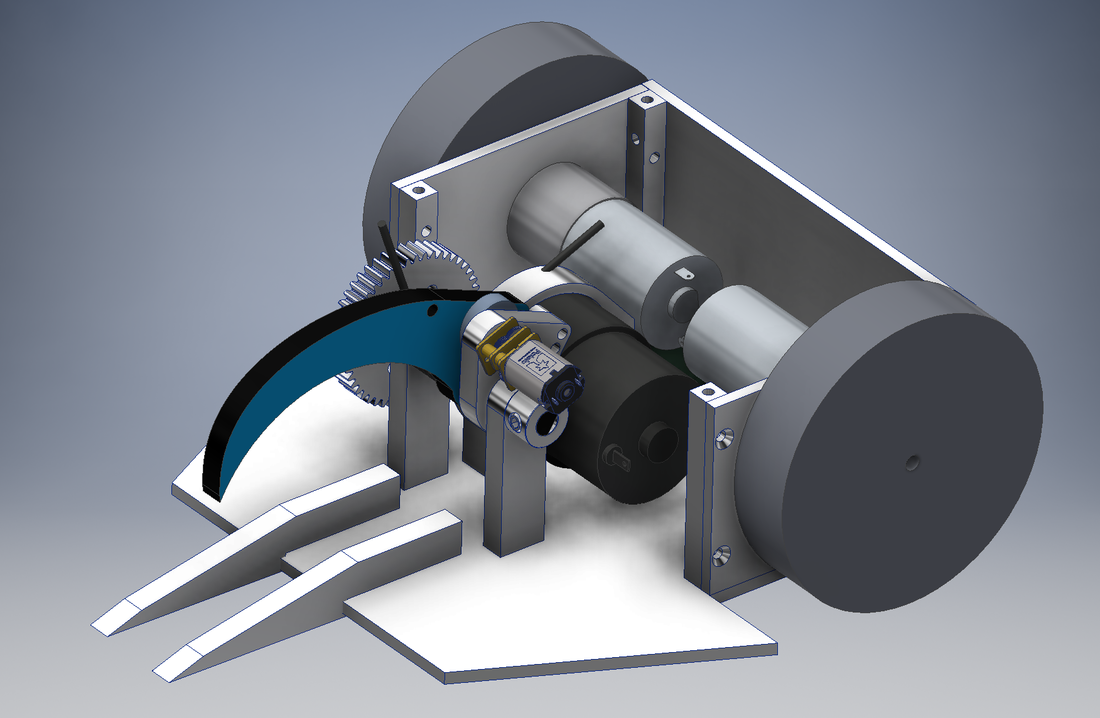
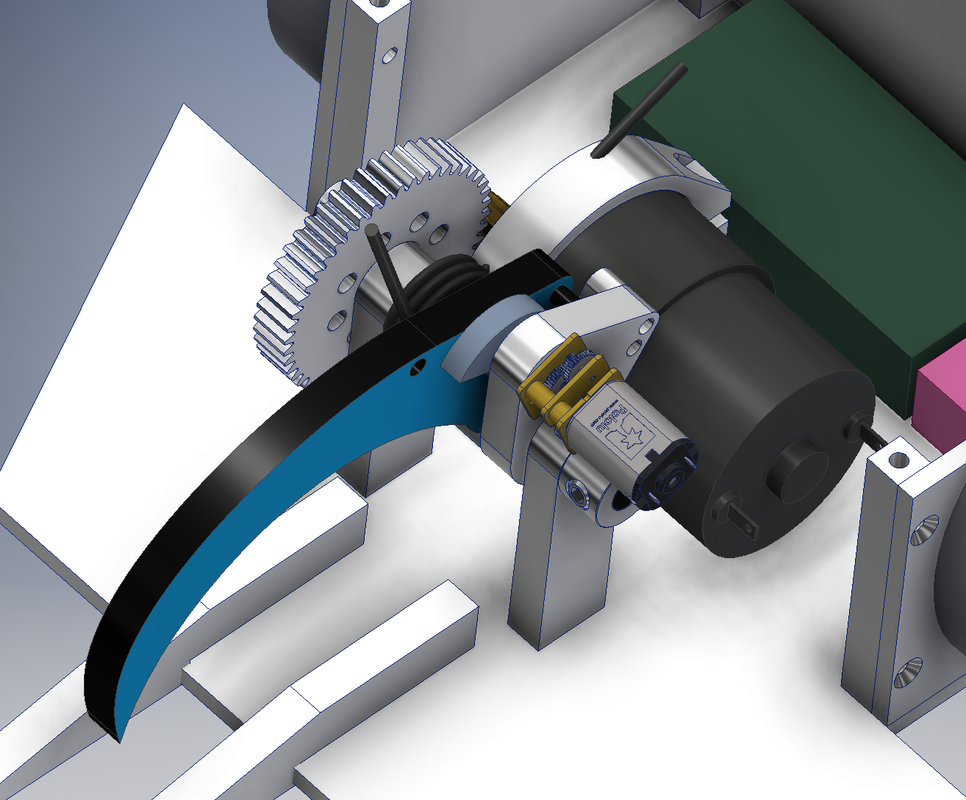
For the weapon, I am going to attempt to build a double-action crusher. A small gear-motor will drive a drop cam that will cock and release a torsion spring on the main weapon spike. The spring is designed to clamp with ~8 lbs of force, which should be more than enough to hold an enemy bot. Once the bot is held by the spring, the primary weapon motor can be engage. This will drive forward the carriage holding the drop cam until a rear stop engages a pin on weapon spike resulting in the full torque of the weapon motor being transmitted into the spike. This double-action crusher allows for an extremely fast spike movement of 1", followed by a force which ramps up from 8 to ~120 lbf.
For the weapon, I am going to attempt to build a double-action crusher. A small gear-motor will drive a drop cam that will cock and release a torsion spring on the main weapon spike. The spring is designed to clamp with ~8 lbs of force, which should be more than enough to hold an enemy bot. Once the bot is held by the spring, the primary weapon motor can be engage. This will drive forward the carriage holding the drop cam until a rear stop engages a pin on weapon spike resulting in the full torque of the weapon motor being transmitted into the spike. This double-action crusher allows for an extremely fast spike movement of 1", followed by a force which ramps up from 8 to ~120 lbf.
 RSS Feed
RSS Feed
